
曾家豪 Zeng Jiahao
机器人感知 / SLAM / 导航
北京航空航天大学 机器人工程 硕士研究生。
研究方向为机器人感知与导航,包括 SLAM、自主探索、路径规划与嵌入式系统部署。
📍 北京📧 3083448680@qq.com📱 191-1889-2896
教育经历
北京航空航天大学
GPA 3.66/4.0 | 深度学习及应用 (94)、空间机构与现代机器人学 (90)、单片机系统 (95)、矩阵理论 (94)
Y709-1 研究生党支部书记,2026 年校级优秀学生干部
福州大学
GPA 前 30% | 机器人学、机器视觉及应用、微机原理、C++ 程序设计、控制工程基础、机电装备设计

项目经历
灭火、救援机器人共性关键技术研究(国家重点研发计划)2024.10 – 至今
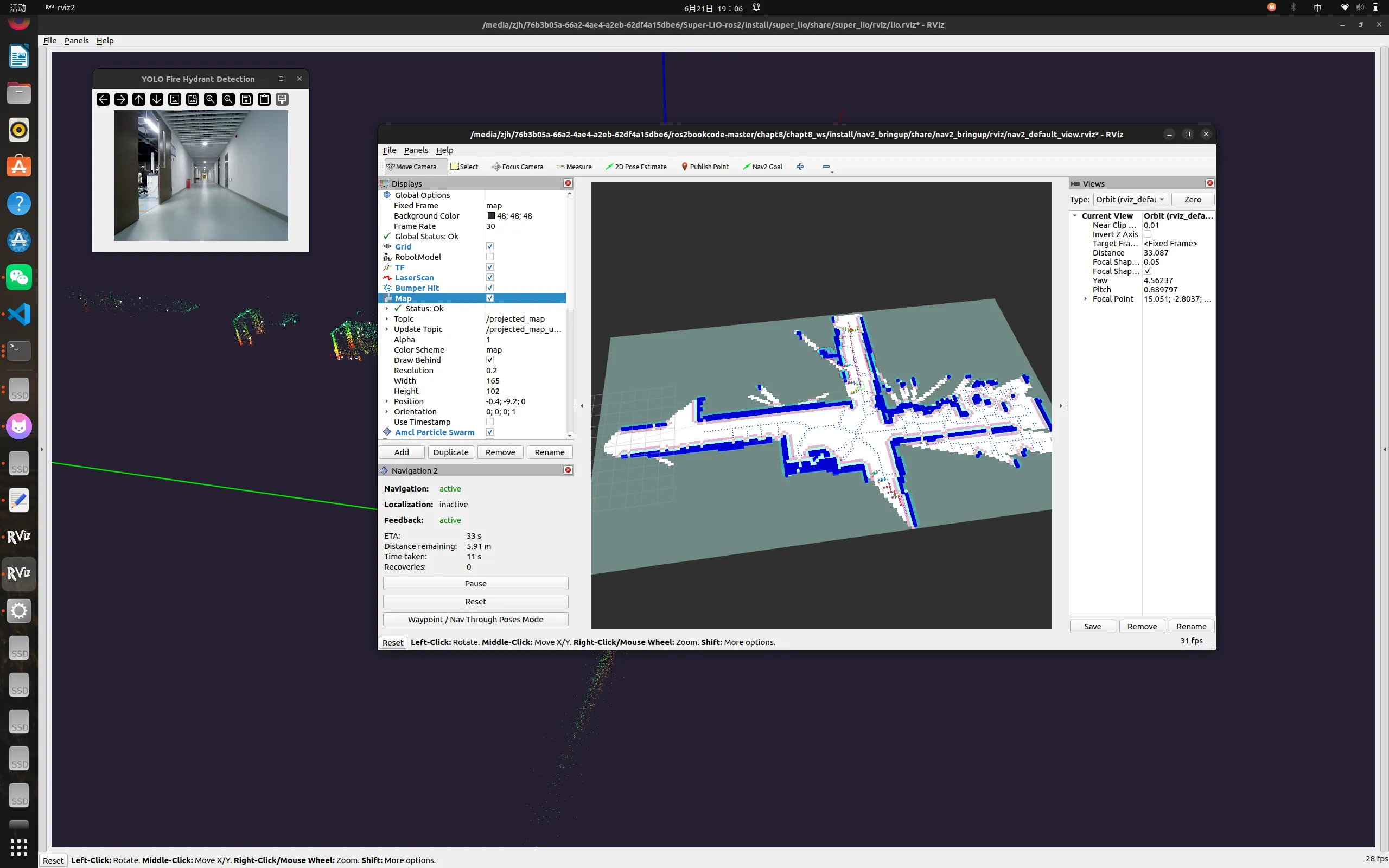
SLAM 定位
基于 FAST-LIO2 引入 OctVox 紧凑地图结构与 HKNN 启发式 KNN 搜索,在 ARM 平台上实现长距离 (>100m) 定位精度 <15cm。
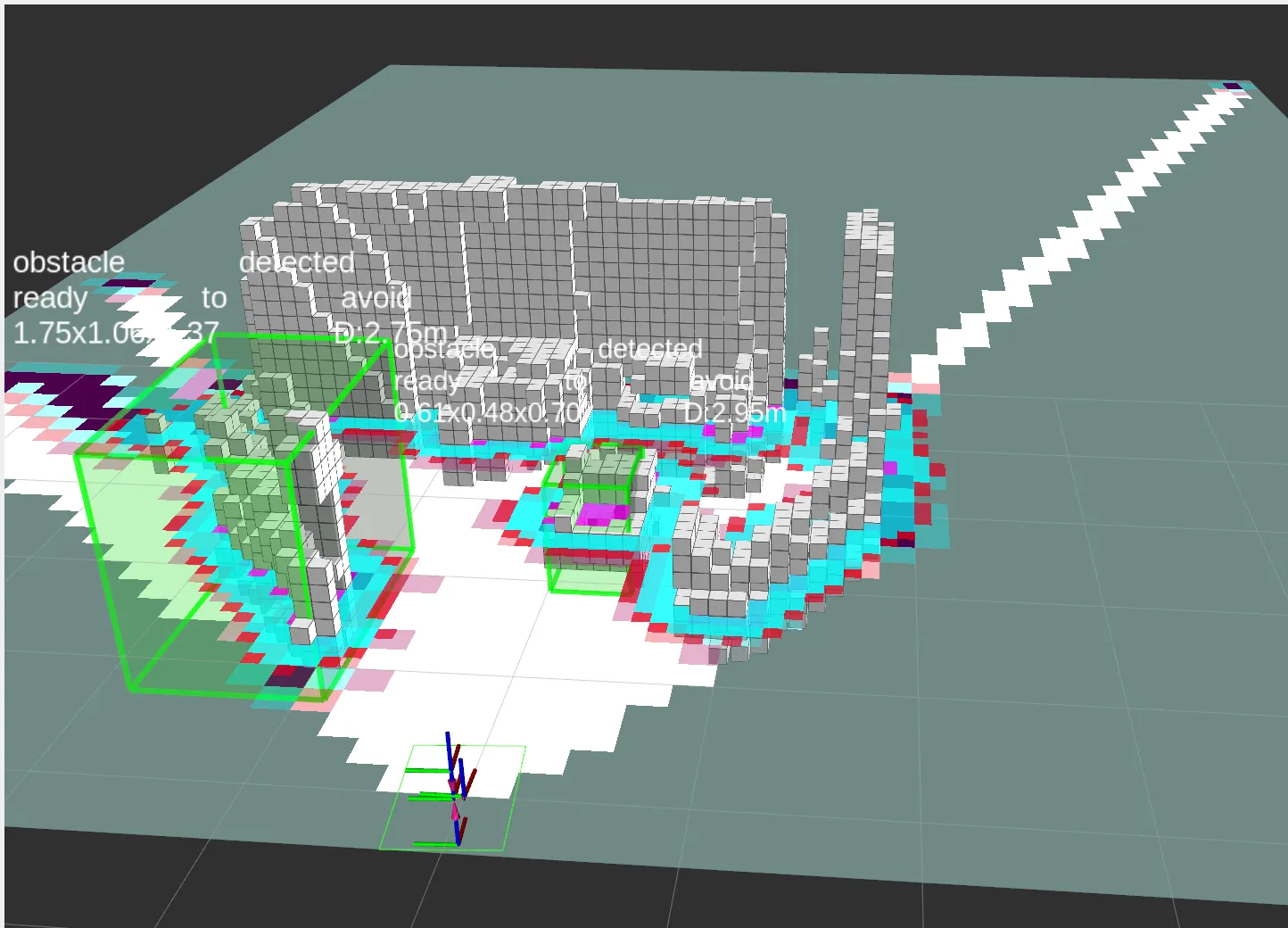
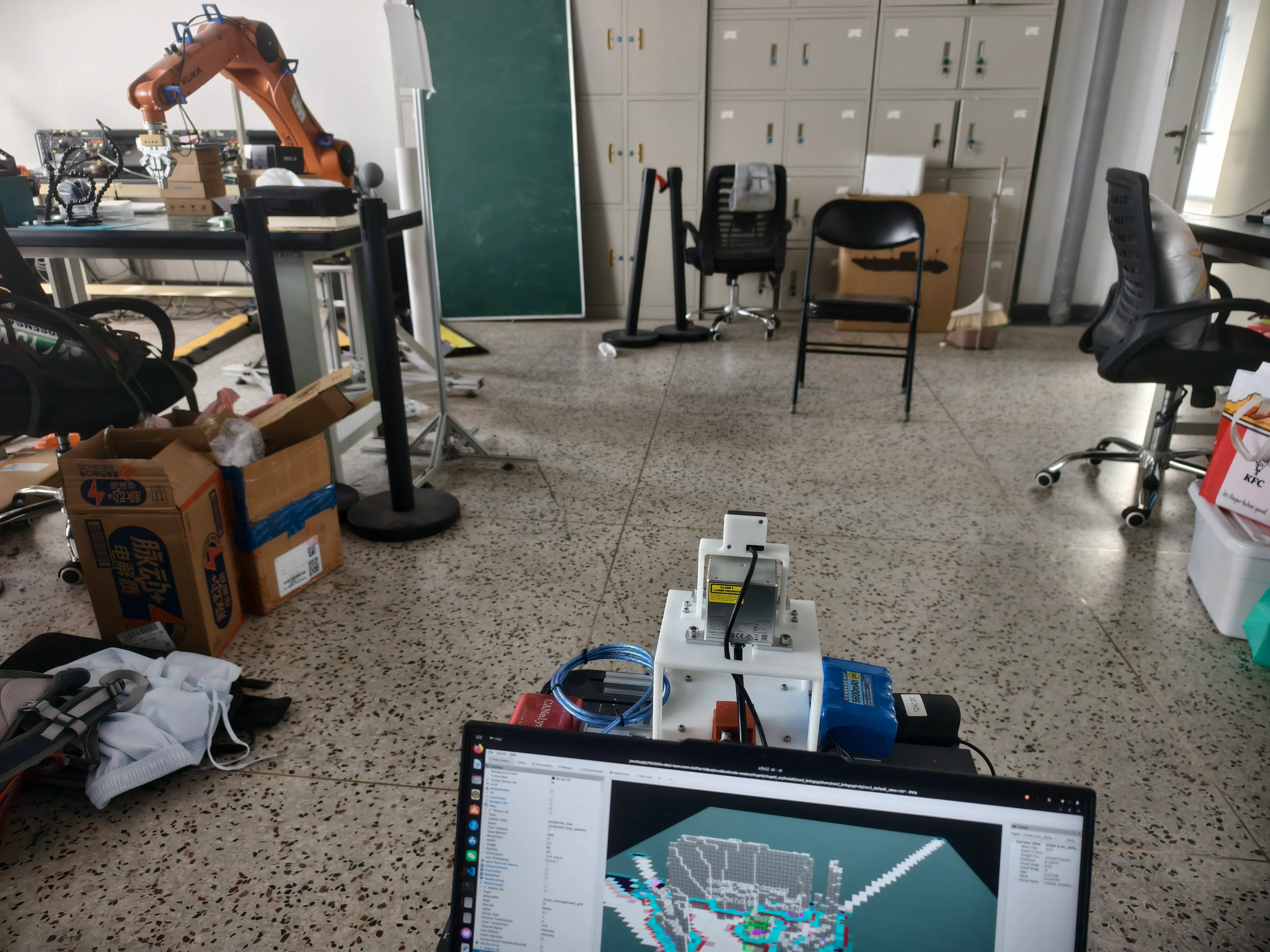
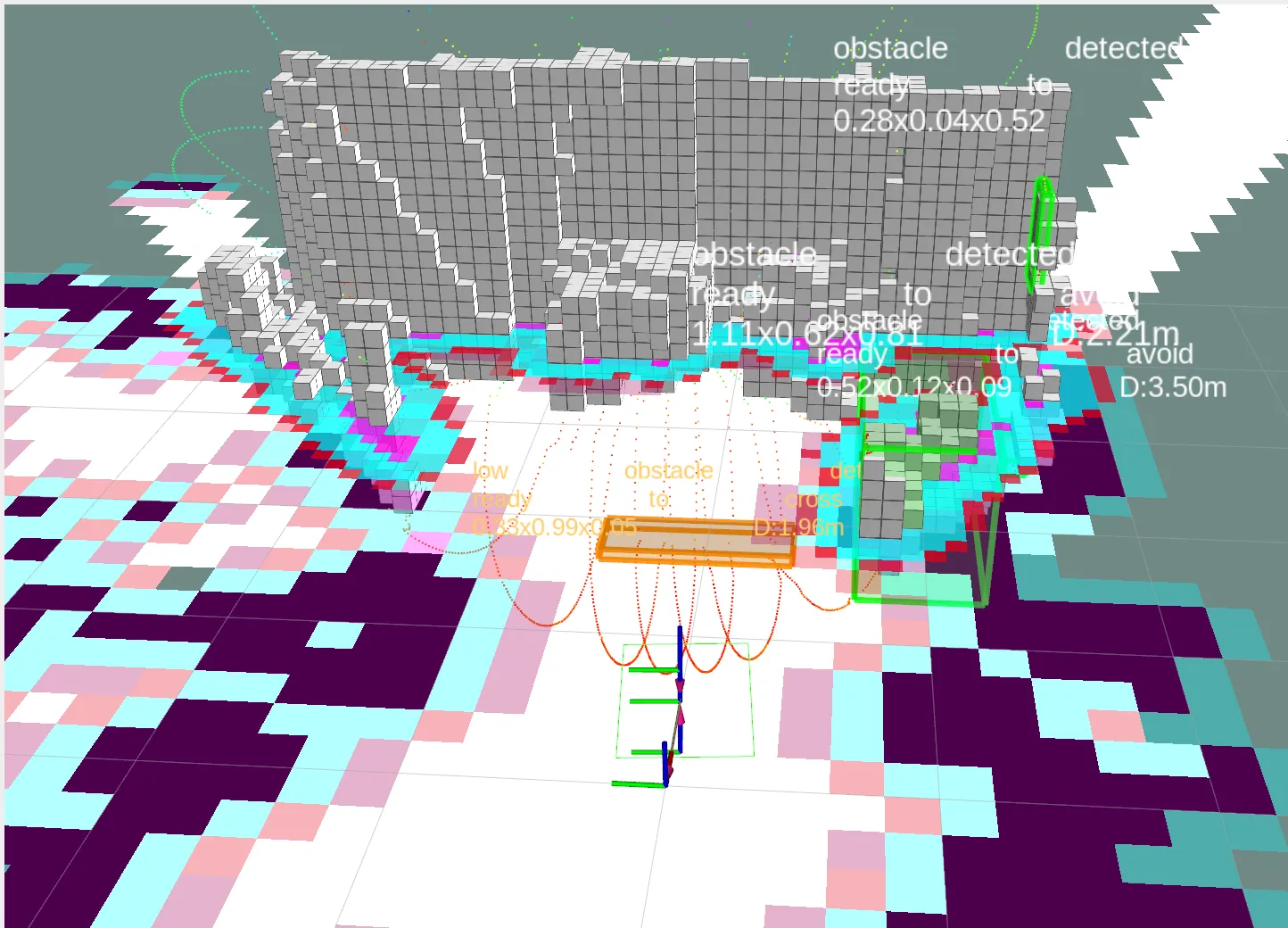
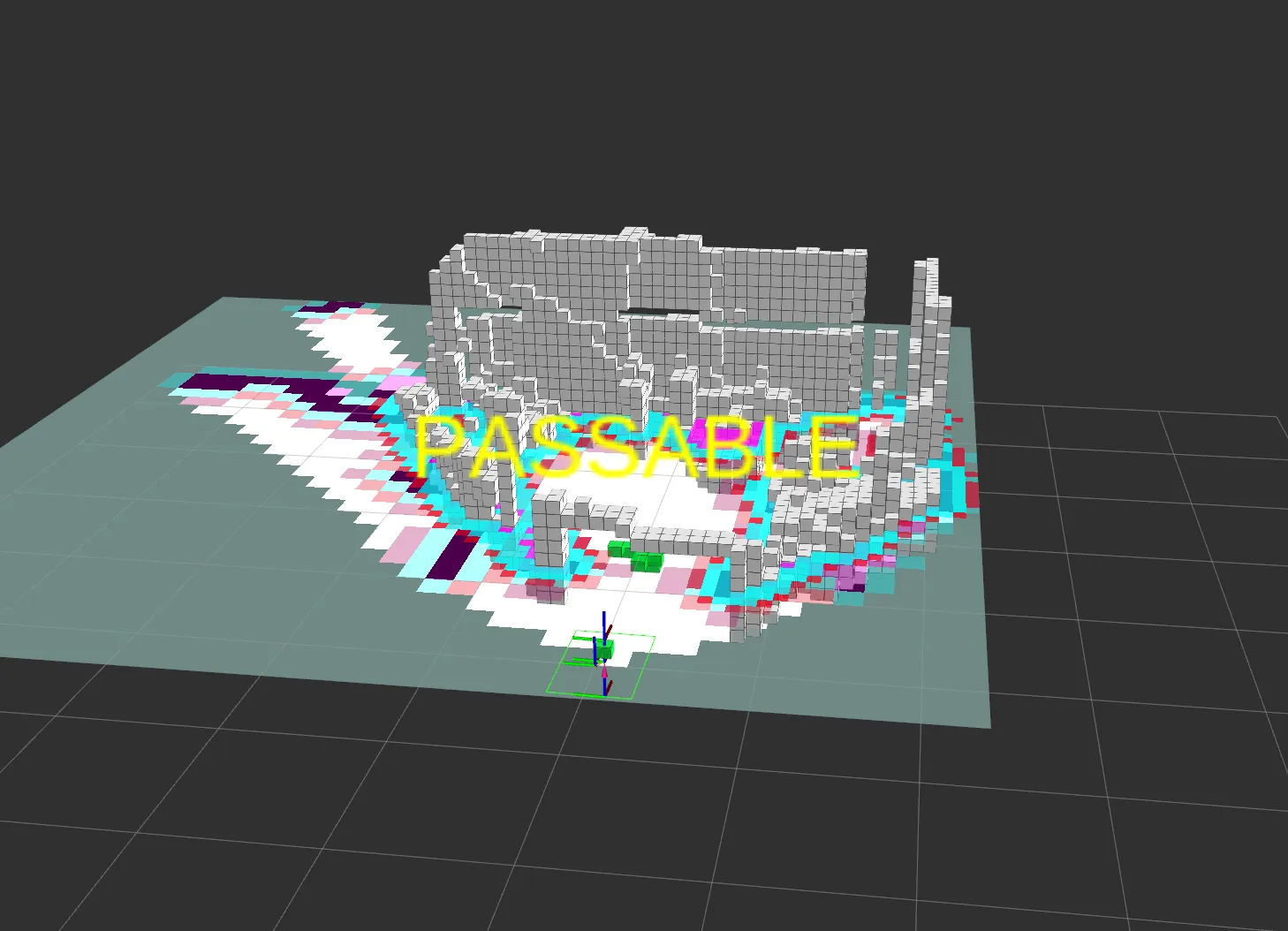
障碍物识别与避障
改进 TEB 避障算法,融合时空体素层 (STVL) 作为局部代价地图,实现动态避障、越障与穿越。

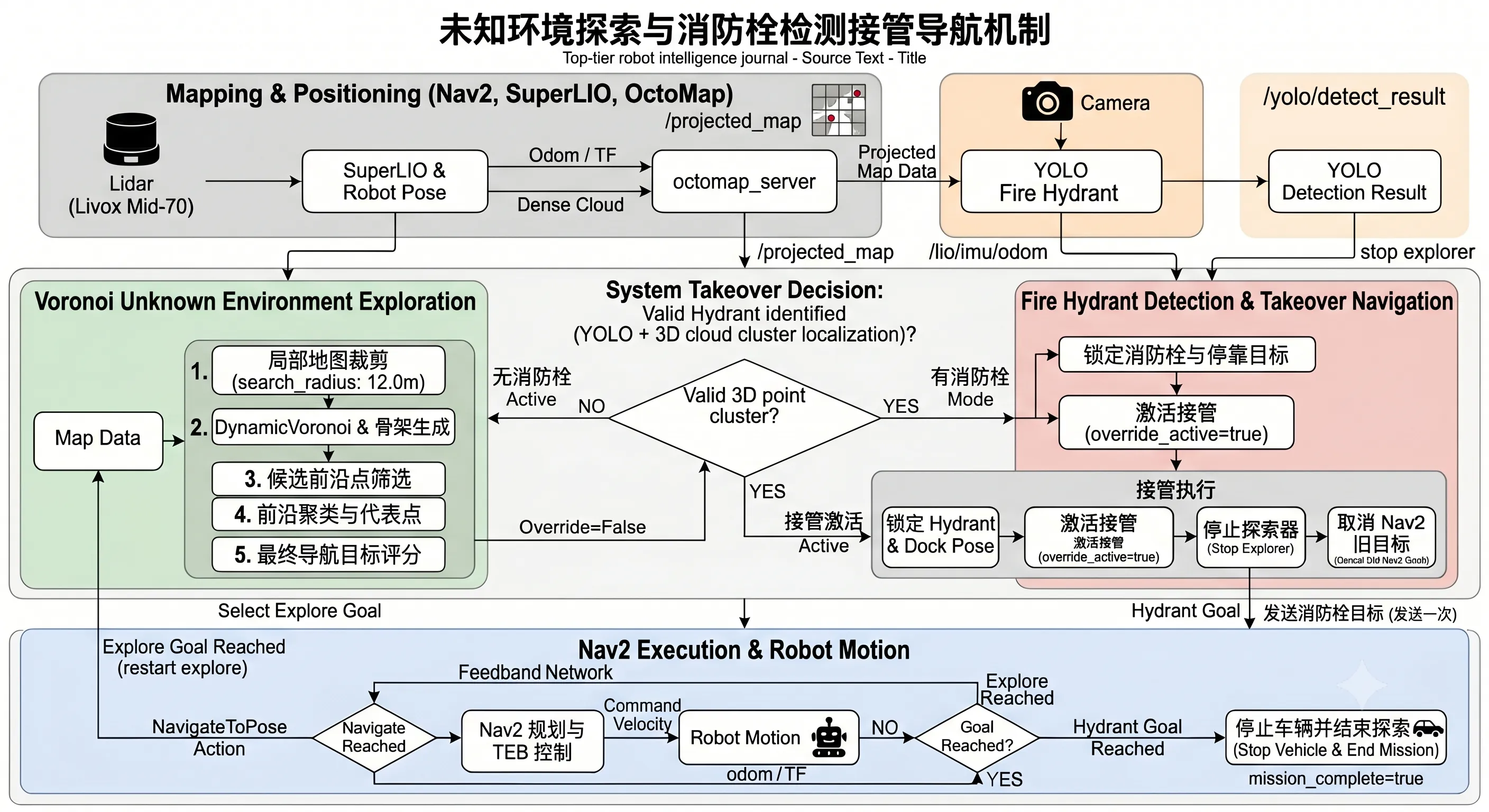
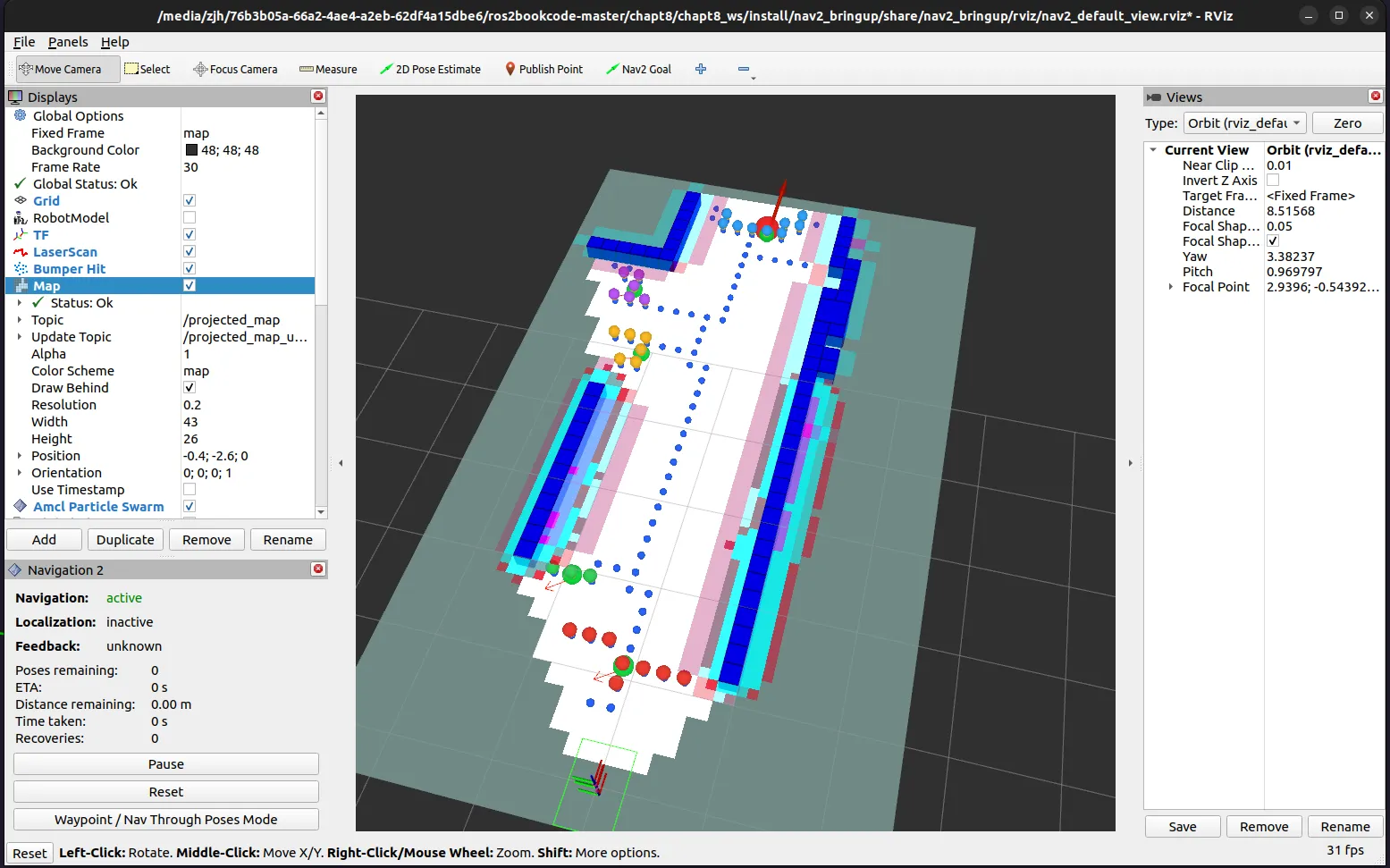
自主探索
基于动态维诺图开发自主探索器,融合 YOLO 目标检测,实现 30m×30m 未知室内环境 Object-Goal Nav。
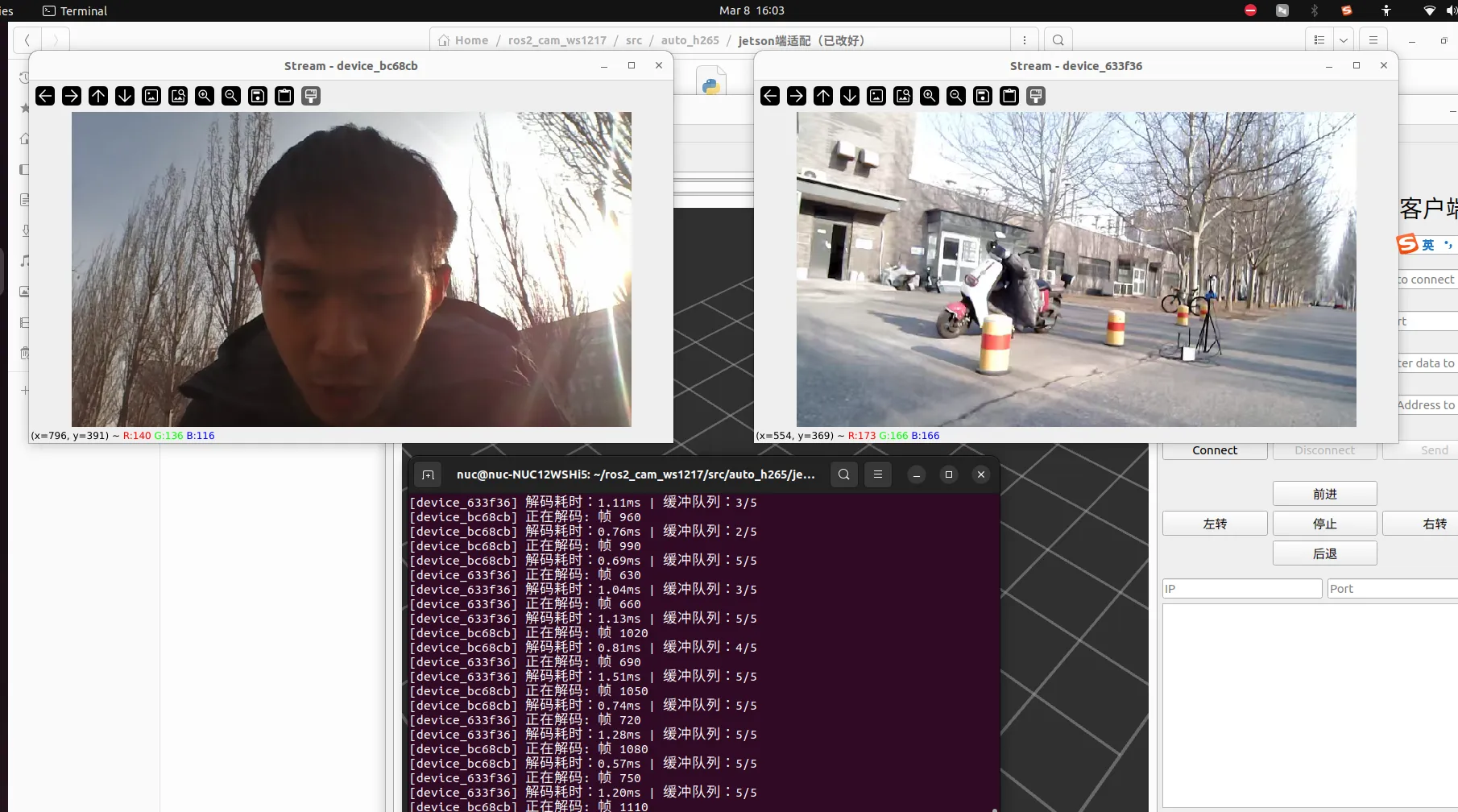
视频传输
基于 FFmpeg H.265 编码实现长距离窄带宽无线 mesh 组网下的多路视频流收发,单路 720p@30fps 压缩至 1Mbps 以内。
聚变堆遥操作维护重载臂底盘系统(国家重大科技基础设施项目)2024.11 – 2026.06
- 基于倍福 PLC + TwinCAT 3 开发重载机械臂 CMOR 底盘运动控制系统
- 设计多层状态机,采用 PLCopen 运动控制规范实现 8 轴 EtherCAT 伺服同步控制与安全联锁
- 设计并搭建 ADS 上位机通信 UI 界面,实现与 PLC 的并发同步通信
视频图像去模糊 2024.11 – 2025.06
- 基于 DeblurGANv2 改进对抗生成网络去模糊算法,SSIM/PSNR 平均提升 10%,总体指标提升近 40%
- 使用 TensorRT 进行模型加速,在 Jetson Orin NX 上实现实时视频流去模糊 (>30fps)
移动作业机器人运动控制研究(本科毕业设计)2023.11 – 2024.05
- 基于 Informed-RRT* 编写 ROS 导航全局规划插件,搭建 Gazebo 仿真环境测试路径规划算法
- 实机使用 Gmapping/Cartographer 建图并实现运动规划导航
技能
ROS2 / ROSC++ / PythonFFmpegPyTorch传感器标定嵌入式开发 (Jetson)Nav2 导航框架SLAMTensorRT